
WP 1 Cognitive Architecture and Modelling
Cognitive architecure (NBU)The main goal of WP1 is to build the cognitive model behind the mind of Rascalli based on the cognitive architecture DUAL/AMBR. This page describes in short the main principles and definitions related to the cognitive architecture and its interaction with the environment. The full cycle of an interaction of a Rascalla and its virtual environment is presented and the corresponding processes in the Rascalla's mind are identified and described. This has been done by introducing a metaphor representing the software agents Rascalli as human-like with a mind and body evolving in and interacting with an environment. In order for the DUAL/AMBR mind to function properly, perception/action layers which transform part of the information from/to the body and the environment are specified. An important part in this specification is the shared ontology between mind, body and environment without which the communication among the three would be impossible. A specific internal structure for the Rascallis' ontology is also proposed which should account for the organization of the agent 'experiences' into memory episodes that can be stored in the long term memory and used in future reasoning (e.g. analogy making).
The cognitive architecture has been proposed by NBU and discussed at the consortium meeting in Sofia, September 2006. The final version has been prepared by NBU with contributions from all the partners.
The human metaphor (NBU)We adopt a human metaphor for Rascalli with the following divisions.
| MIND | |
| action | perception |
| SENSORY-MOTOR LAYER | |
| command | events, messages, information |
| BODY | |
| EFFECTORS | SENSORS |
| ENVIRONMENT | |
Mind - implemented as the DUAL/AMBR cognitive architecture specialized to Rascallis' specific knowledge structure and tasks - communication with its owner, type of knowledge (e.g. music), events etc. The Mind includes a long term memory (LTM) where general and episodic knowledge is stored and a working memory (WM) which is the active part of LTM, perceptual input and goals. The mind operates only on represented knowledge and has only a mediated connection to the body and the environment. Thus it contains a partial, selected representation of the environment at the abstract conceptual level and experiential memories related to the specific episode like organization of the interaction of the Rascalli with their owner(s), other Rascalli and the environment. The interaction with the environment and the body is mediated by the sensory-motor layers. Sensory-motor layers consist of two main parts:
The sensory part, called further Perception layer (PL), selects the information provided by the sensors and translates this information into the symbolic form required by DUAL/AMBR. It makes available these symbolic structures to the Mind by attaching them to the appropriate concepts and relations (see the detailed explanation below). The motor, called further Action Layer (AL), translates action commands from the symbolic form used by the Mind into specific command to the Tools (Effectors).
Body (Tools) - consists of various Sensors and Effectors which allow Rascalli to acquire information from the environment and to perform actions in it.
The Sensors transmit specific information provided by the Environment and the Tools which is be made available to the sensory-motor layers of the Mind.
The Effectors take action commands from the motor part of the sensory-motor layers and execute them. They give feedback and results from their activity to the sensory part of the sensory-motor layers. The Effectors are the parts of the Body Rascalli can use. They can be modules for communication with the user, for specifying and sending a query to a DB, for monitoring interactions with KB, etc.
The Sensors and the Effectors can actually belong to the same module - for instance a query to a search engine is related to sending a command for a specific action and receiving the result of the query. The former can be conceptualized as the action of an Effector and the latter as information to a Sensor.
Environment - defined as everything outside the Rascalli like the owner(s), other Rascalli, knowledge bases (KB) etc. that would be able to function without the Rascalli. The connection of Rascalli to the Environment is only via the Sensors and the Effectors. System architecture (NBU)
The RASCALLI platform is based on the paradigm of Service Oriented Architecture (SOA). This means each logical unit is treated as a service with a clearly defined interface. Separating implementation and interface, this approach allows setting up working system architecture as early as possible by using dummy components. A further advantage of this approach is its high modularity and plug-and-play character where individual implementations of system components can easily be exchanged.
On top of all the architecture is the Mind. It communicates with the Body via the Action Dispatcher Component in one direction and directly in the opposite. As mentioned above, the Action Dispatcher Component decides which Tool to transfer the mind command to. The Tools can act upon the Environment or process information and return it back to the Mind. This Mind-Tool communication is intercepted by non-organic systems, dealing with emotions, logging and profiling. All those are not subject of this paper.
Going into more abstract level, we separate the so-called Rascalli services (such as web mining, question answering, information extraction, music analysis etc.) from DUAL services, and use the action-perception loop as the interface to DUAL. This loop is done between the Body (including different Tools) and the Mind. As stated, it is message-based and uses RDF as transport.
The Mind uses frame-based format for its internal knowledge representation. This format is close enough to RDF representation, so straight-forward translation is possible to implement. This is the task of the JAVA-based proxy. The technology of choice is JAVA, as it allows easier scaling and integration with different technologies. The current version of the Mind is made in LISP. For all those reasons we invented the design concept of a Communication System - the only way for the mind to reach the Tools. An integral part of it is the JAVA proxy. The Communication System is the software title of the sensory-motor layer.
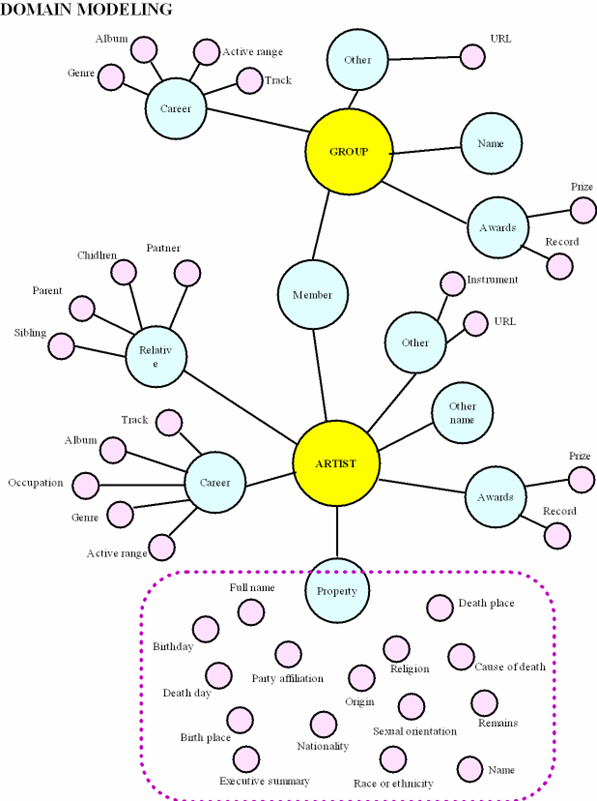
Domain Modelling (DFKI)
DFKI has the task to construct a gossip database so that users can talk
with the RASCALLI agents about properties of a musician such as
personal profiles, social contexts, achievements, gossip topics and
career relevant issues. The gossip content is modelled as an ontology,
utilizing the formal language OWL. We summarized and categorized the
interested properties and related information of musicians which are
often mentioned in news and gossips into 6 scenarios:
Person name: the surnames, given names, nick names, full names
and stage names of the musician
Relative: parents, children, siblings and partners
Career: the genres which the musician involves in, e.g. pop,
folk; track names and albums he (she) performed
Awards: prizes, e.g. Grammy, Best Music Video and records e.g.
1998, Most Successful Artist on Record he(she) achieved
Property: the characters he (she) hold, i.e. eye color, hair
color, nationality, birthday, death day and sexual orientation, and the
related information, i.e. occupation, address and relig-ion.
Other: instruments he (she) played; pets he (she) had; the
official websites, i.e. URL and WIKI
Influence: other musicians influence the musician
The concepts and properties centering around the musician are depicted
in the following figure:
Integration of Ontologies (ONTO)
The various components in the system architecture utilize different ontologies and data. Their integration and the integration of ontologies, specific to the application scenarios, is critical for the transition to the cognitive architecture built around the SemanticDB. Semantic DB is the component which serves as basis for DualRDF and implements closed-domain reasoning. Such layering provides unquestionable benefits in terms of flexibility and reuse of data and infrastructure, but also presents some difficulties. The major challenge is to develop a schema for integration data which should all be interlinked and processed by the Mind. We have developed a model which successfully integrates:
internal ontologies, relevant to the operation of the mind and the tools.
external ontologies, related to specific domains and applications
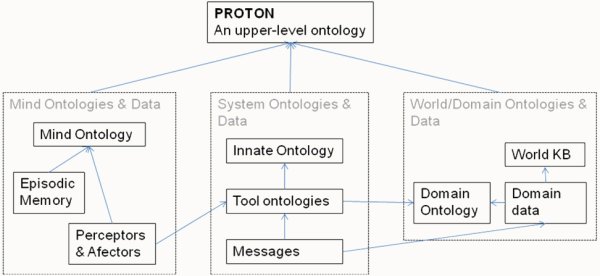
The integration is based on PROTON upper level ontology, because it allows easy integration of common/general knowledge. As an upper-level ontology PROTON is rich enough to model all aspects of the used ontologies by means of abstract concepts and primitives necessary to model various situations, states, entities etc. The integration approach was based on using bridge-ontologies. Such an approach allows for maximum flexibility, e.g. the domain ontologies and their mappings to the upper-ontology can be edited independently.
The next diagram illustrates the relationships between the various specialized ontologies and the upper level ontology which aligns them. The ontologies are grouped by their purpose in the Cognitive Architecture. The arcs that link them represent the ontology interdependency.
Fig. The integration of ontologies
The integrated set of ontologies and data was loaded in the SemanticDB. The approach of using central data management component in the current cognitive architecture makes the Knowledge Bases and data integration schema an integral part of this architecture. In the previous version these were external components of the architecture, accompanying and enriching it with the necessary functionality they provided and were used mainly as supporting infrastructure around it. There were separate interfaces allowing one to query and explore an external Knowledge Base with respect to the internal state of the Dual mind or enabling a particular tool to request and access semantically enriched data.
Back to workpackages
RASCALLI is supported by the European Commission Cognitive Systems
Programme (IST-27596-2004).
RASCALLI develops a new type of personalized cognitive agents, the
Rascalli, that live and learn on the Internet.
Rascalli
combine Internet-based perception, action, reasoning, learning, and
communication.
Rascalli come into existence by creation
through the user. The users not only create their Rascalli but also
train them to fulfil specific tasks, such as be experts in a quiz
game or assist the user in a music portal.
![]()