CoBot Studio
Crossing Realities for Mutual Understanding in Human–Robot Teams
The project researches human-robot interaction from a collaborative point of view where the mutual ability of human and robot to understand each other’s signals is core to the successful completion of joint tasks, and also plays a major role for human acceptance of and trust in the robot as a workmate. We study close collaborations of humans with cobots employing both Virtual Reality (VR) scenarios and real world encounters with the collaborative robot CHIMERA (Joanneum Robotics) combining a UR10 robot arm and a MiR-100 mobile platform. The advantage of working with both a real robot and its digital twin lies in the broader range of possible investigations into human-robot collaboration scenarios as VR allows for very close physical proximity between human and robot, and for robot action speeds that would today still be impossible near humans due to safety and security regulations. However, will be realistic scenarios in the near and medium-term future due to constant improvements in safety-critical sensor technology.
Publications
- Krenn, B., Gross, S., Dieber, B., Pichler, H., Meyer, K. (2021). A proxemics game between festival visitors and an industrial robot. Workshop on Exploring Applications for Autonomous Non-verbal Human-Robot Interaction at HRI 2021, Boulder, Co.
- Krenn, B., Reinboth, T., Gross, S., Busch, C., Mara, M., Meyer, K., Heiml, M., Layer-Wagner, T. (2021). It's your turn! - A collaborative human-robot pick-and-place scenario in a virtual industrial setting. Workshop on Exploring Applications for Autonomous Non-verbal Human-Robot Interaction at HRI 2021, Boulder, Co.
- Mara M., Meyer K., Heiml M., Pichler H., Haring R., Krenn B., Gross S., Reiterer B., Layer-Wagner T. (2021). CoBot Studio VR: A Virtual Reality Game Environment for Transdisciplinary Research on Interpretability and Trust in Human-Robot Collaboration. 4th Edition of the International Workshop on Virtual, Augmented, and Mixed-Reality for Human-Robot Interactions at HRI 2021, Boulder, Co.
- Gross, S., Krenn, B. (2020). The role of corpora for robots' acquisition of linguistic structure through observation and natural language instructions. In Proceedings of the 1st IEEE International Conference on Human-Machine Systems.
Gallery
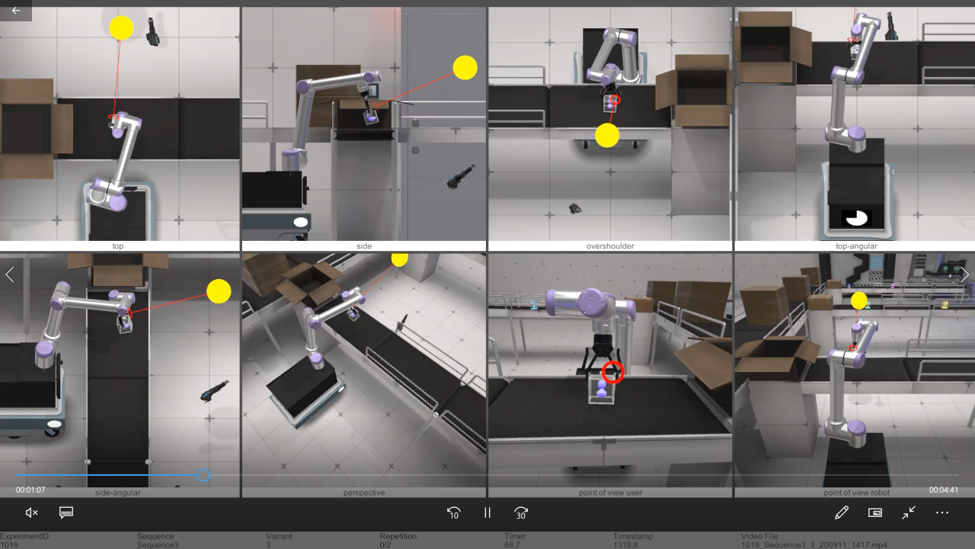
Screenshot from the Virtual Reality (VR) Enviornment: Perspectives on a human-robot pick-and-place collaboration scene. The red circle marks the eye gaze of the human co-worker. In addition, the head of the human is represented as yellow dot. Also visualized is the controller (black gadget) the person holds in their hand.
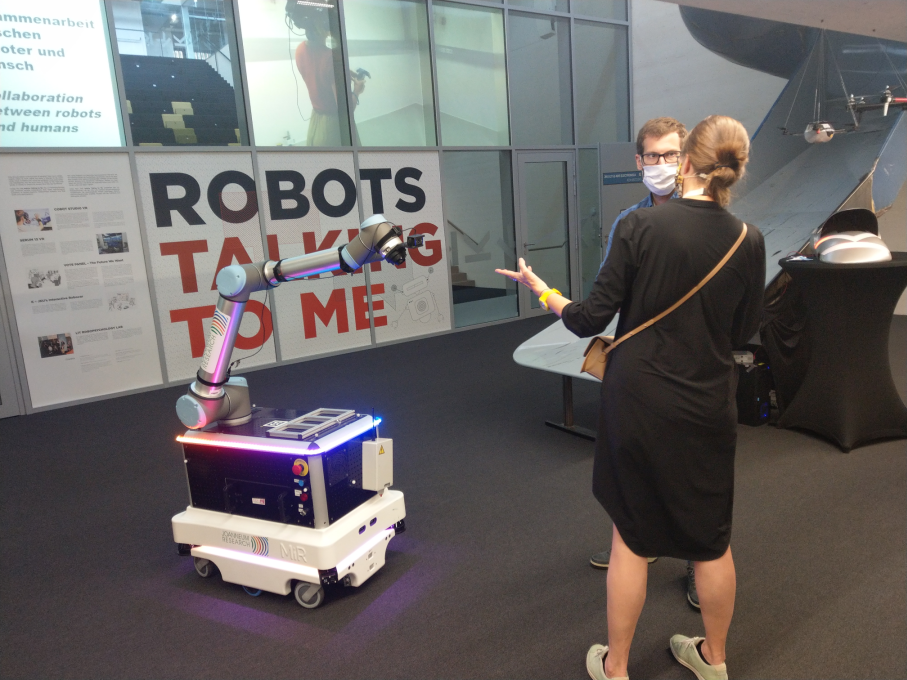
The CoBot Studio project presents the 'Proximity Game' at the Ars Electronica Festival 2020 in Linz. Festival visitors are encouraged to interact with the industiral cobot CHIMERA.

"Robot, pay attention to me!" Testing human-robot interaction in a playful VR scenario. The human signals the cobot to direct its attention to herself.

Research staff
Partners
- LIT Robopsychology (project coordinator)
- Polycular OG
- Joanneum Robotics
- Ars Electronica Futurelab
- Blue Danube Robotics
- Universität Salzburg
Sponsor

Austrian Research Promotion Agency (FFG)
Ideen Lab 4.0 – № 872590

- Duration
2019 to 2022 - Coordinator
LIT Robopsychology - Sponsor
Austrian Research Promotion Agency
- Contact
at OFAI
Brigitte Krenn